Milica Stojanovic - Projects
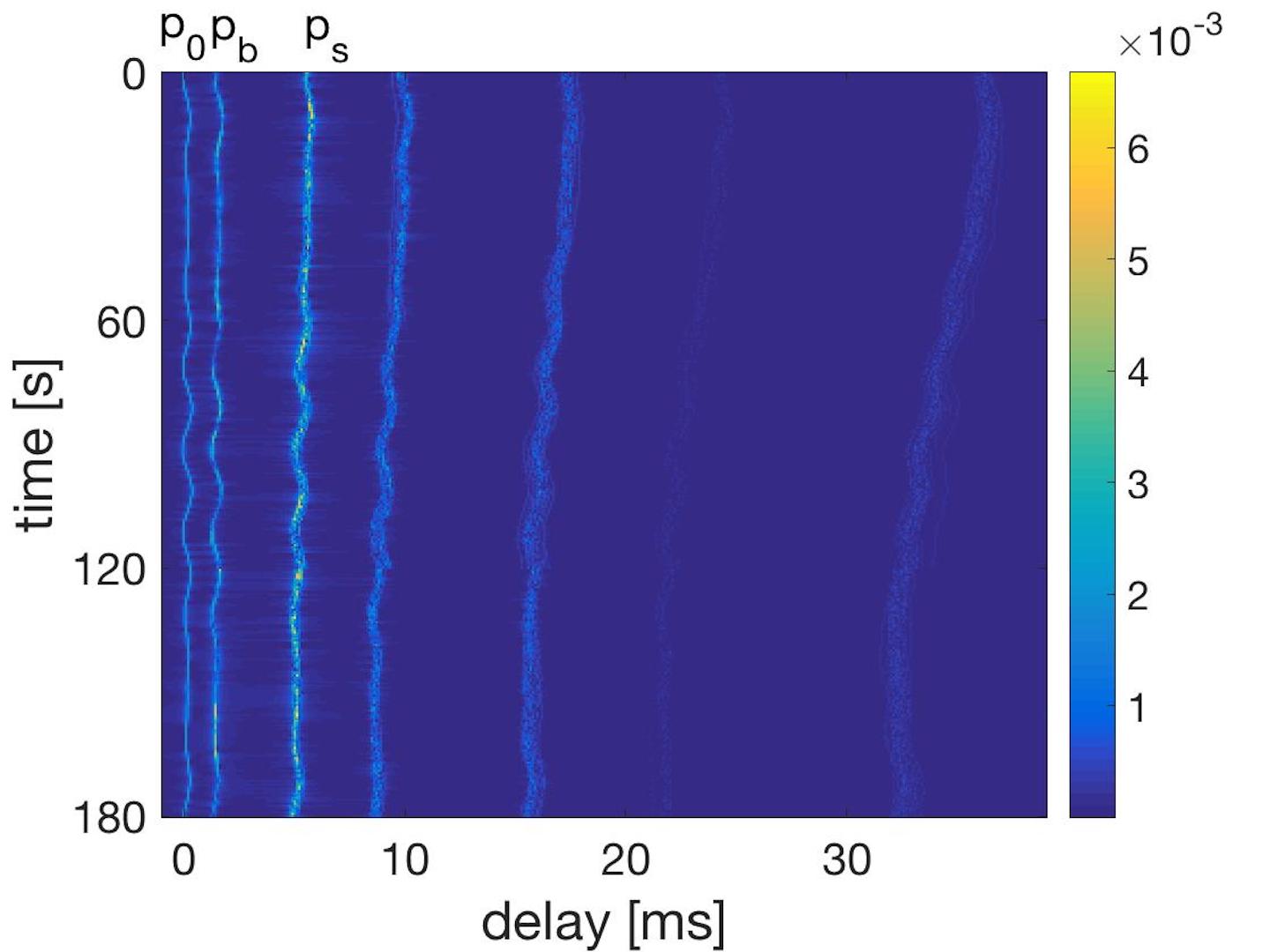
Acoustic channel modeling and simulation
The simulator generates a series of channel impulse responses for a given time-varying underwater acoustic channel geometry. It addresses the effects of multipath, rough surface scattering, motion-induced Doppler, and large-scale channel variation.
 |
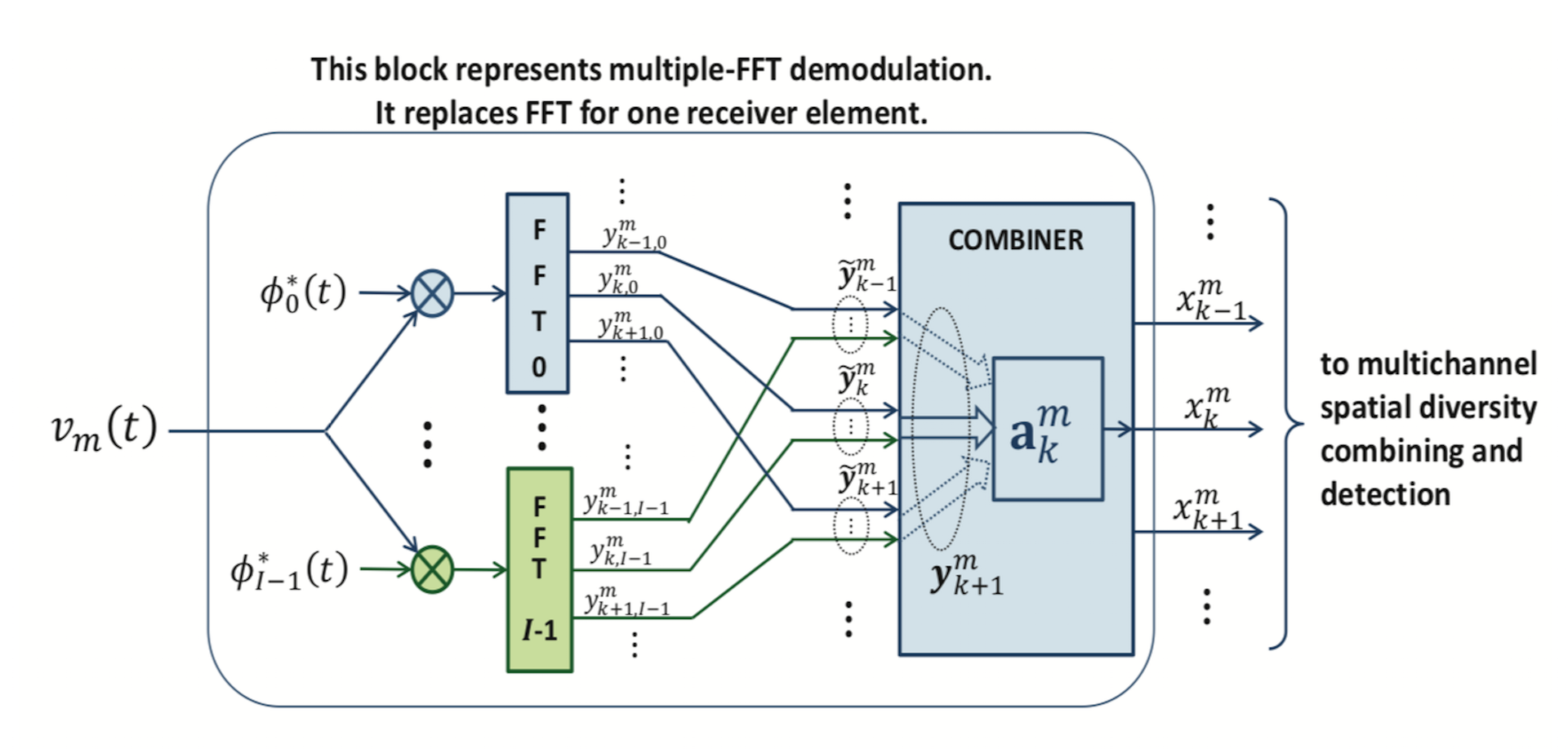
Multi-FFT detection of OFDM signals in time-varying channels
Multi-FFT demodulation techniques include partial FFT (P-FFT), shaped FFT (S-FFT), fractional FFT (F-FFT), and Taylor series FFT (F-FFT). These techniques are beneficial on channels where residual Doppler shifting and time-variation are not negligible over the duration of an OFDM block.
 |
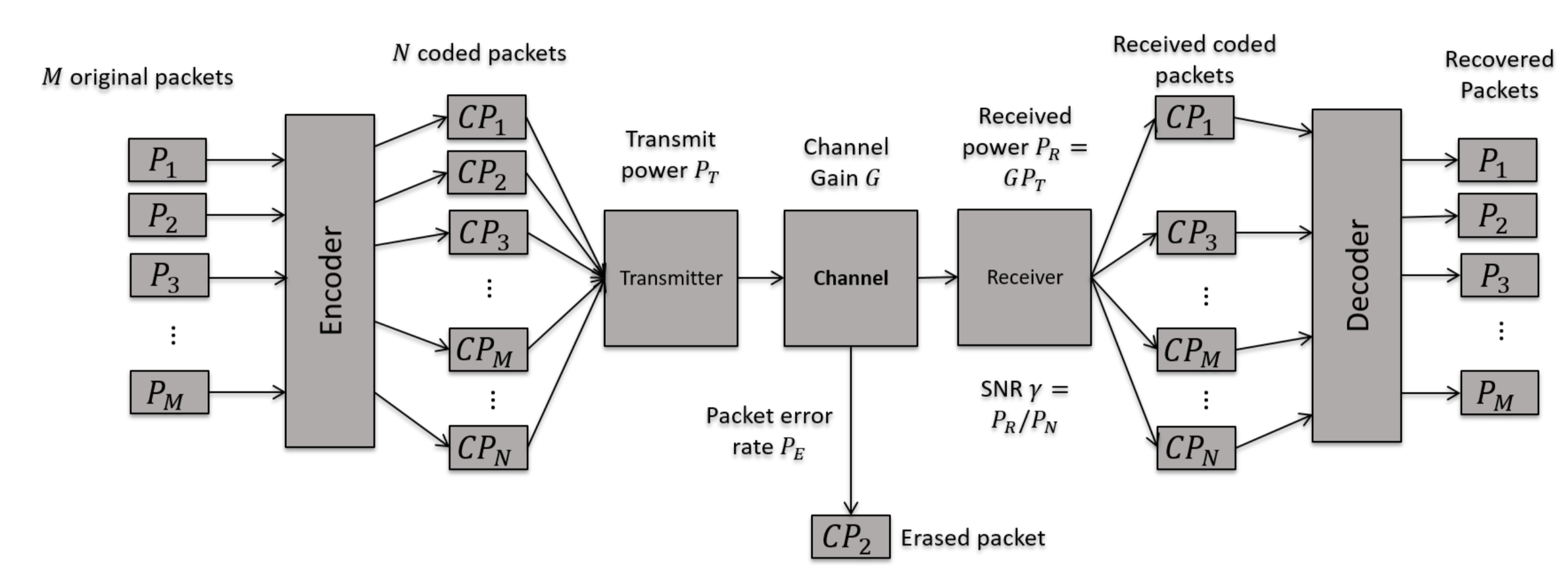
Packet coding for fading channels with long delays
Random linear packet coding improves the reliability and throughput efficiency on channels with long propagation delays, such as the underwater acoustic channels. Adaptive power and rate control are combined with packet coding to counteract large-scale fading.
 |
Acoustic multicarrier ICI-mitigating receiver
In mobile acoustic systems, Doppler effect can be severe enough that the received OFDM signal experiences non-negligible frequency offsets even after initial resampling. In situations with high mobility, however, OFDM systems are challenged by thetime-variability of the channel, as the relative motion between transmitter and receiver creates carrier-dependent Doppler shifts, thus introducing inter-carrier interference (ICI) which has a detrimental impact on data detection performance. Reliable coherent data detection requires the channel state information at the receiver. Pilot-assisted channel estimation based on physical propagation model is used to obtain the necessary channel state information for reliable coherent communications. When multiple receive elements are available, correlation between the elements, if exists, can be exploited to reduce the signal processing complexity without compromising the performance.
 |
Exploitation and exploration in actuated communication networks
This NSF-supported project aims to design mobile underwater acoustic networks in which navigation mechanisms for communication-constrained autonomous underwater vehicles is integrated with sensing and classification to provide solutions for the exploration-exploitation tradeoff. The project is a collaboration between Northeastern University, University of Southern California and Massachusetts Institute of Technology. An MIT news article that describes some of our work is here. More about our project, along with relevant publications, can be found here.